경남대학교 기계공학부 나언주 교수
[한국미디어뉴스통신=김승현 기자] 현대 사회는 4차 산업혁명의 변화가 곳곳에서 일어나고 있다. 물리세계, 디지털세계, 그리고 생물 세계가 융합되어, 경제와 사회의 모든 영역에 영향을 미치게 하는 새로운 산업시대가 열리고 있다. 1차 산업혁명의 기계화, 2차 산업혁명의 대량생산화, 3차 산업혁명의 정보화에 이은 4차 산업혁명은 물리사물인터넷(IoT), 로봇공학, 가상현실(VR) 및 인공지능(AI)과 같은 혁신적인 기술이 우리가 살고 일하는 방식을 변화시키고 있다.

메카트로닉스시스템을 전공한 경남대학교 기계공학부 나언주 교수는 “4차 산업혁명 시대가 열리면서 여러 직업군이 인공지능로봇으로 대체되고 사라질 수 있습니다. 인공지능로봇이 대체할 수 없는 창의적인 직군만이 살아남겠죠” 라고 말했다. 나 교수는 다가올 미래에 맞게 제자들에게 창의적 기술 교육과 인류생활 향상에 기여하는 전문 기계기술자를 양성하고 급변하는 첨단 기술 세계에 대한 능동적 적응능력을 갖춘 기계 기술 인력을 양성하고 있다.
학생들이 좀 더 창의적이고 문제해결능력을 길러주는 것을 목표로 하고 있는 나언주 교수는 “교과서를 암기하고 정형화된 문제에 정답만 찾는 것은 4차 산업혁명시대에는 맞지 않는 교육방법입니다. 단적으로 미국은 아이들이 학교에 가는 걸 좋아합니다. 재밌기 때문이죠. 즐기면서 여유를 가질 때 창의적인 아이디어가 나옵니다. 책을 많이 읽고 음악도 열심히 듣고 인문학적 소양을 쌓아가다 보면 창의력이 풍부해집니다. 또 가끔 학생들에게 중산층이 되라고 말합니다. 프랑스에서는 중산층의 조건은 3가지를 충족시켜야 합니다. 자신 있는 요리 1가지를 할 줄 알 것, 최소 1가지 악기를 잘 연주할 수 있을 것, 그리고 정기적인 봉사를 할 것입니다” 라고 강조했다.
로봇의 시각 및 촉각 시스템 개발로 4차 산업혁명이 나아가야할 새로운 방향 제시
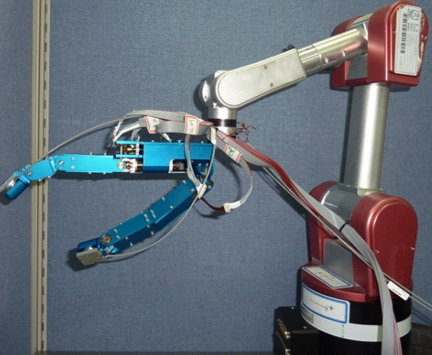
나언주 교수가 연구계획에는 두 가지 방향이 있다. 하나는 주전공분야인 자기베어링을 지속적으로 연구하는 것과 다른 하나는 새롭게 시작한 원격조종 로봇팔/손 시스템을 개발하는 것이다. 나교수는 “원격조종 로봇팔/손 시스템은 현재로선 여러 가지 해결해야 될 기술적인 문제가 많습니다. 그중 세 가지를 꼽자면 시각시스템, 촉감시스템, 인공근육을 개발하는 것입니다. 인간의 눈은 자연스럽게 3차원을 인식하지만 로봇에서 3차원 비젼을 구현하는 것은 매우 어렵습니다. 인간의 뇌에서 3차원을 인식하는 알고리즘은 아직까지 과학적으로 밝혀내지 못했습니다. 그리고 로봇이 물건을 만졌을 때 촉감을 느끼게 하는 기술(인공피부)도 어렵지만 꼭 필요한 기술입니다. 마지막으로 인공근육인데요. 현재의 로봇시스템에는 구동기로서 모터를 사용하는데 여러 문제점이 많습니다. 모터는 동물들의 근육처럼 큰 파워를 내지 못하고 관절구조에 적용하기가 어렵습니다. 동물의 근육처럼 자연스러운 인공근육이 개발되면 로봇팔/손을 효율적으로 구현할 수 있습니다” 라고 말했다.
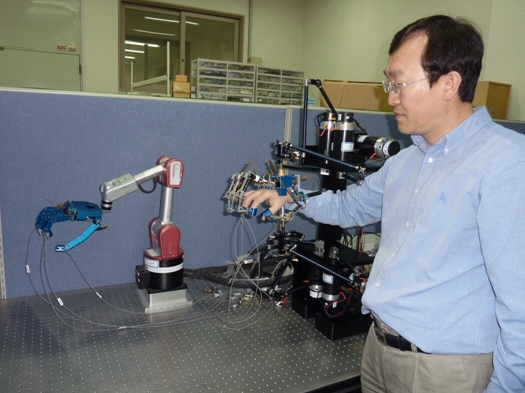
이미 원격지에 있는 로봇을 제어하고 로봇이 외부환경과 접촉할 때 촉감을 사용자에게 전달하여 현실감을 느끼게 하는 도구인 햅틱장치(haptic device)를 독자 개발하였고 이를 이용한 원격 조종 로봇 팔/손 시스템 연구에 사활을 걸고 있는 나언주 교수는 4차 산업혁명 시대의 열쇠는 당연히 로봇이며, 이를 위해 선행되어야 하는 것이 바로 로봇의 시각, 촉각 시스템 개발이라는 것이라 말한다. 이 시스템이 개발되면 사람의 접근이 힘든 원자로 안이나, 심해, 우주공간 등에서의 작업에 활용할 수 있고 또한 엑소스켈러튼(exoskeleton) 로봇 형태로 개발하면 척추마비환자나 노인의 근력증강 장치에 적용이 가능해 진다. 반드시 지금보다 진일보된 로봇이 상용화될 수 있도록 연구를 멈추지 않겠다는 각오로 진행하고 있다.
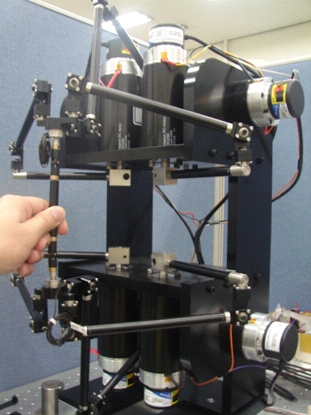
이와 더불어 나언주 교수가 개발한 일체형 자기 베어링은 기존 일체형 자기 베어링과 다르게 장점이 무궁무진하다. 모터, 발전기, 컴프레서 등 모든 회전기계의 필수 요소부품이 베어링이다. 전통적인 구름베어링(볼베어링)은 저렴한 가격에 요구 성능을 만족시킬 수 있어 대부분의 회전기계에 사용되지만 수명이 있어 일정시간 후에는 교체해줘야 하고 마찰열 때문에 고속회전에 한계가 있다. 자기베어링은 전자석, 영구자석에서 발생된 자기력을 이용하여 회전하는 축을 기계적인 접촉이 없이 지지하는 메카트로닉스 시스템이다.
나언주 교수는 “자기베어링이 80년대부터 미국, 유럽을 중심으로 연구되었고 많은 선배 연구자들의 노력 덕분에 현재는 각종 회전기계에 적용하여 상용화할 수준에 이르렀습니다. 자기베어링은 보통 2개의 반경방향 베어링과 1개의 축방향 자기베어링으로 구성되는데 각각의 베어링이 차지하는 공간으로 인하여 시스템의 크기가 커지고 회전축도 길어지게 됩니다. 이러한 공간적인 제약을 개선하기 위해서 반경방향 자기베어링과 축방향 자기베어링을 결합한 일체형 자기베어링이 연구되기 시작했고 소형 경량화에 유리합니다. 하지만 이러한 형태의 일체형 자기베어링은 축방향 디스크를 가진 구조로 분해조립의 어려움이 따릅니다. 제가 연구 개발한 diskless 일체형 자기베어링은 축방향의 제어에 릴럭턴스 힘을 이용하여 축방향 디스크를 없앤 구조로서 시스템 유지 보수시에 분해조립이 훨씬 용이한 장점이 있습니다. 회전기계의 고장 또는 유지보수 시에 일반적인 베어링 시스템은 축방향 디스크 때문에 회전축을 분리하려면 전체 시스템을 분해해야하는데 이런 수고를 줄여보자는 목적으로 본 연구가 추진되었고 성과를 내게 되었습니다. 제가 생각한 것은 축방향 베어링에는 반드시 지지할 수 있는 디스크가 필요하다는 고정관념을 깨는 것입니다. 특정한 자기력(릴럭턴스 힘)을 이용하면 디스크 없이도 축방향의 힘을 제어할 수 있습니다. 모든 회전기계에 자기베어링을 적용할 수 있지만 고가의 제작비로 인해서 현재 적용하고 있는 분야는 초고속 고부가가치 회전기계에 한정됩니다. 예를들면 고진공 터보분자펌프, 인공심장용 원심형 혈액펌프, 우주용 플라이휠 에너지 저장장치, 초고속 원심분리기(우라늄) 등입니다.”라고 밝혔다.
연구자로서는 먼 훗날 후배 연구자가 논문에서 많이 인용하는 기억에 남는 연구성과를 내는 것이 꿈이라 말하는 나언주 교수는 수년간의 힘든 연구를 하고 그 결과를 아무런 댓가 없이 public domain 즉 논문에서 공개하고 이를 후배 연구자가 논문에서 참고문헌으로 인용하는 것이면 자신은 만족한다고 한다. 학자로서 명예를 말하는 것이다. 그의 연구, 개발에 기대치가 높아지는 이유이기도 하다.